Session: PD43: Kidney Cancer: Localized: Surgical Therapy V
PD43-12: New 3D virtual models with renal perfusion volumes: optimizing the clamping strategy during robot-assisted partial nephrectomy to minimize the postoperative renal injury
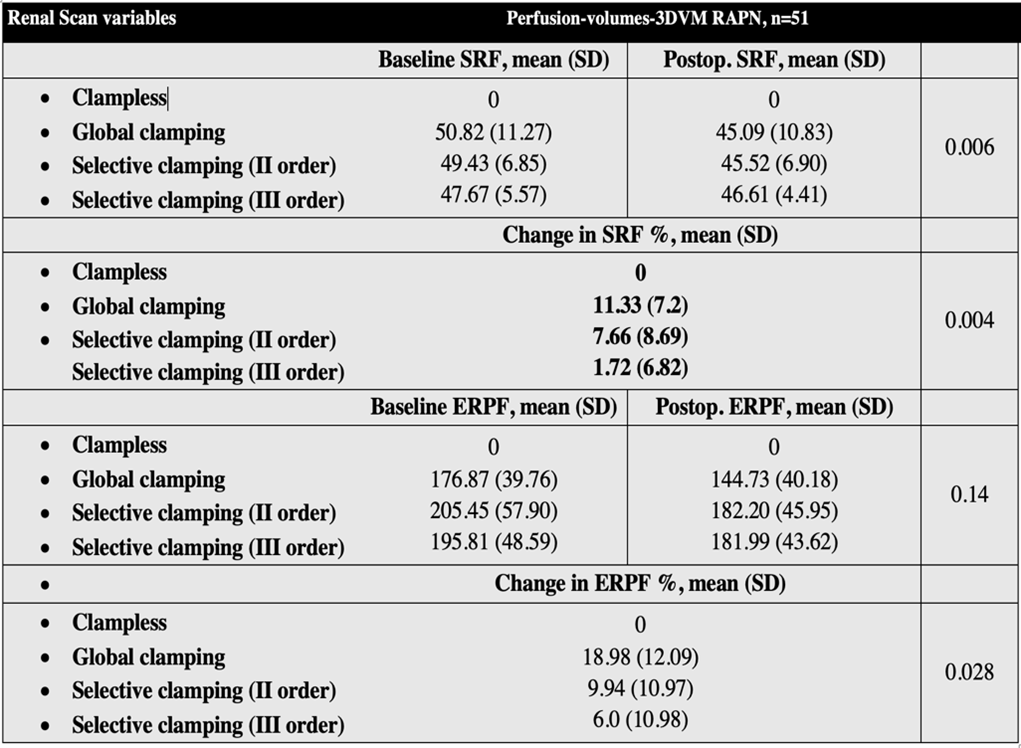
Introduction: The aim of this study was to develop and test new 3D virtual models (3DVM) considering their different perfusion volumes instead of vascular regions empirically estimated, to evaluate their intraoperative accuracy in guiding selective clampings and to assess their impact on the renal function of the operated kidney. Methods: We implemented our 3DVMs together with the Voronoi diagram, a Euclidean distance-based mathematical tool used to calculate vascular dominant regions in other organs. A perfusion volume-based 3DVM was built for all the renal masses scheduled for robot-assisted partial nephrectomy (RAPN) from 12/2019 to 09/2022. On its basis a selective or superselective clamping, limited to the peritumoral area, was planned and performed intraoperatively when feasible. To assess the functional impact of the clamping strategy on the operated kidney a sub-cohort of patients underwent baseline and 3 months postoperative renal scintigraphy (RS), evaluating the split renal function (SRF) and estimated renal plasmatic flow (ERPF). Results: 103 patients were prospectively enrolled in the study. The median (IQR) number of kidney and tumor perfusion volumes were 8 (7-10) and 3 (2-3), respectively. In 79 patients (76.6%) a selective clamping was performed, for 16 (15.5%) patients the main artery was clamped, and 8 (7.8%) patients underwent clampless procedure. The median (IQR) ischemia time for global and selective clamping were 17 (15-25) and 16 (12-20) minutes, respectively. In the 51 patients underwent RS (Table 1), mean change in SRF rate decreased from 11.3% to 7.7% and 1.7% for global, selective (I order artery) and super-selective (II order artery) clamping, respectively (p=0.004). Similarly, mean change in ERPF rate diminished from 18.9% to 9.9% and 6.0% for the same category groups (0.02). Conclusions: The implementation of mathematical algorithms to 3DVMs allows a precise estimation of the kidney perfusion volumes, minimizing the extension of the ischemic region with the selective clamping and leading to reduce the postoperative renal function impairment. SOURCE OF Funding: None.

.jpg "Daniele Amparore, MD photo")