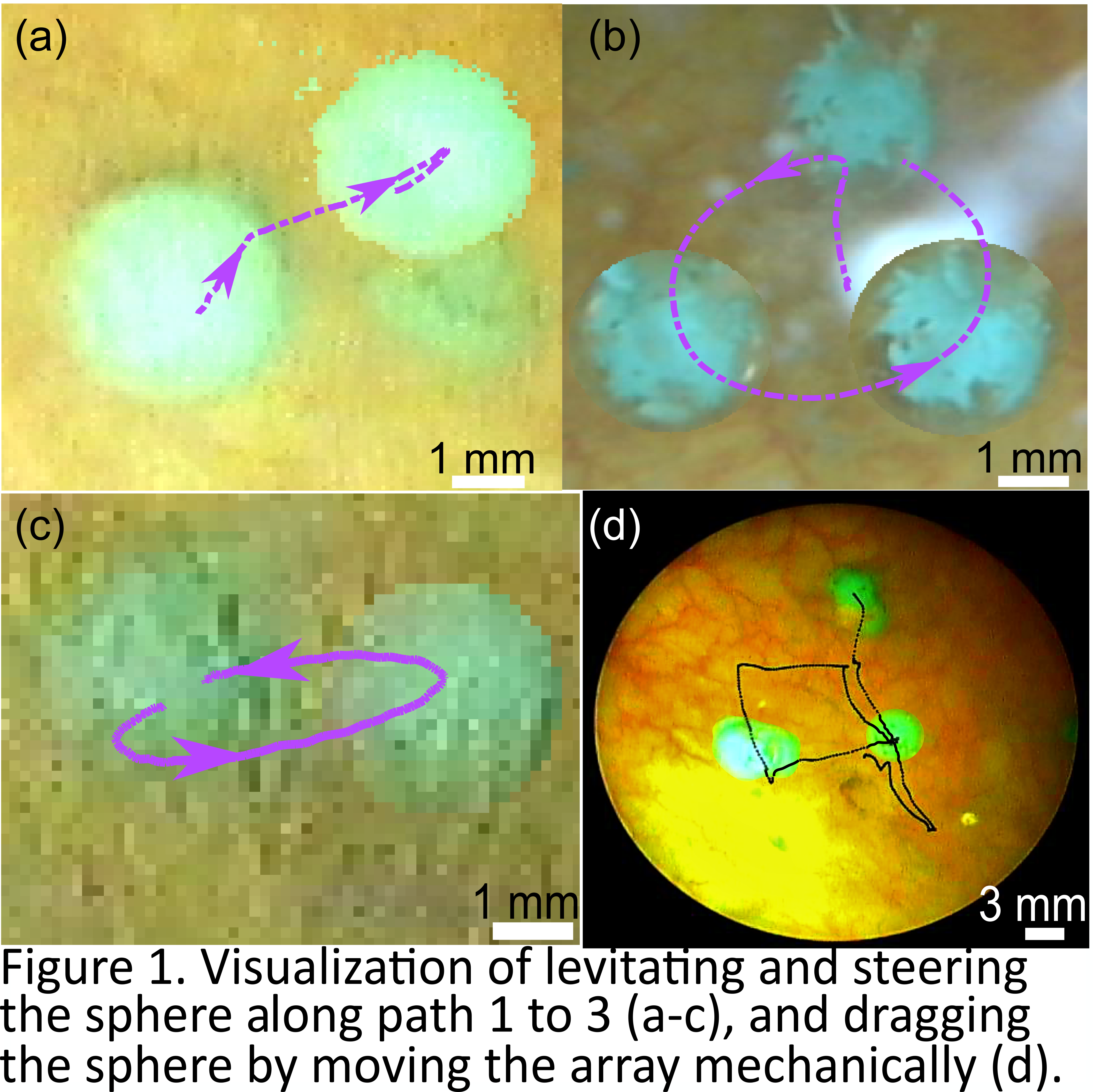
Introduction: Ultrasonic propulsion has been demonstrated in clinical trials to noninvasively reposition renal stones along the direction of the probe. However, extracorporeal manipulation of stones causing ureteral stone obstruction requires controlled movement along a complex path in the urinary tract. Here, we evaluate the safety and utility of a method for controlled manipulation of stone models in vivo in a complex three-dimensional (3D) path using focused ultrasound beams. Methods: A multi-element ultrasound array transducer with a 12-cm focus was used to produce an acoustic trap around a stone model (3 mm glass sphere) in the bladder of three pigs under anesthesia. The array was coupled to the pig by a water bath and synchronized with a P6-3 ultrasound imaging probe for targeting. A cystoscope was inserted into the bladder to visualize the motion. The sphere was acoustically trapped and steered along three different paths (Fig. 1a-c). Deviation of the measured from the intended path was calculated to quantify the accuracy. The total energy exposure to manipulate the stone was low; at 1.5 MHz, the maximum exposure had a maximum peak pressure of 1.4 MPa and a pulse average intensity of 133 W/cm2. The bladder was then evaluated histologically. Results: Spheres were levitated and moved in the three paths in all pigs for a total of 26 manipulations. The spheres were lifted and moved 1) laterally 3 mm and back down, 2) in a horizontal , and 3) in a vertical loop of 3 mm radius. The average discrepancy between the desired path and that observed on ultrasound was 0.24±0.07 mm, and by the cystoscope was 0.17±0.09 mm. The sphere was dragged for 5 cm along the bladder wall by moving the array mechanically (Fig. 1d). The skin to stone depth was 2 ± 0.5 cm. Histology showed no signs of injury to the bladder wall. Conclusions: This work demonstrated the controlled, noninvasive manipulation of stone models in vivo at safe ultrasound power levels. This work potentiates the use of noninvasive ultrasound tweezers to facilitate movement of stones in any direction which could expand the capabilities of ultrasonic propulsion alone. SOURCE OF Funding: Work supported by NIDDK P01 DK043881, K25 DK132416.